密碼找回
賬號找回
刪除信息
常見問題
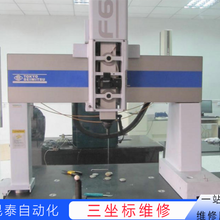
弗爾迪三坐標(biāo)測量儀維修工作匯總
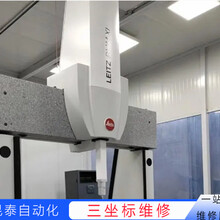
leitzzeiss自動三座標(biāo)維修案例講
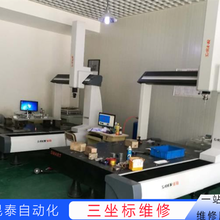
常州麥科三維三坐標(biāo)維修服務(wù)好
弗爾迪三坐標(biāo)噪音大維修速度快
2年
微信在線
13961122002
維鴻WH三坐標(biāo)儀維修心得體會
¥556
揚(yáng)州Wenzel溫澤三坐標(biāo)維修相關(guān)知識
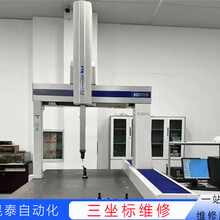
南京力德LEAD三坐標(biāo)檢測儀維修能搞定
上海Wenzel溫澤三次元測量儀維修成功案例
馬爾三坐標(biāo)突然掉電維修詳細(xì)解答
西卡德三坐標(biāo)噪音大維修速度快