密碼找回
賬號(hào)找回
刪除信息
常見問題
發(fā)那科機(jī)器人無法啟動(dòng)維修啟動(dòng)報(bào)警
泰禾機(jī)器人驅(qū)動(dòng)板維修現(xiàn)場(chǎng)實(shí)錄
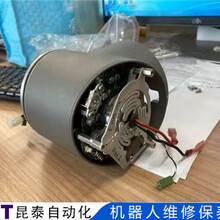
韋森貝格機(jī)器人電機(jī)維修60S看完
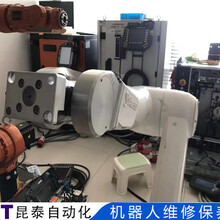
松下機(jī)器人控制柜維修瞧一瞧
2年
微信在線
13961122002
發(fā)那科機(jī)器人M-3iA/6A維修保養(yǎng)周期短
¥530
正信激光機(jī)器人伺服電機(jī)維修快掌握
博裕機(jī)器人伺服驅(qū)動(dòng)器維修60S看完
新松siasun機(jī)器人SRM120A維修保養(yǎng)技巧介紹
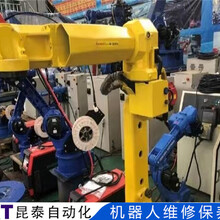
IGM焊接機(jī)器人維修保養(yǎng)心得體會(huì)
那智越機(jī)器人伺服電機(jī)維修新入選